Fujun Ruan中文版I am a research assistant at the CMU Biorobotics Lab. From 2021 to now, I studied at Carnegie Mellon University as a Master of Science in Mechanical Engineering student. My research advisor is Howie Choset. I'm interested in Robotic, Smart Addtive Manufacturing, product development. |

|
News |
Toward Closed-loop Additive Manufacturing won 2023 IROS Best Industrial Robotics Research for Applications!
Winner & Creativity Award in Chinese off-season event!!!
Research / Project / Internships & Work Experience
Research |
|
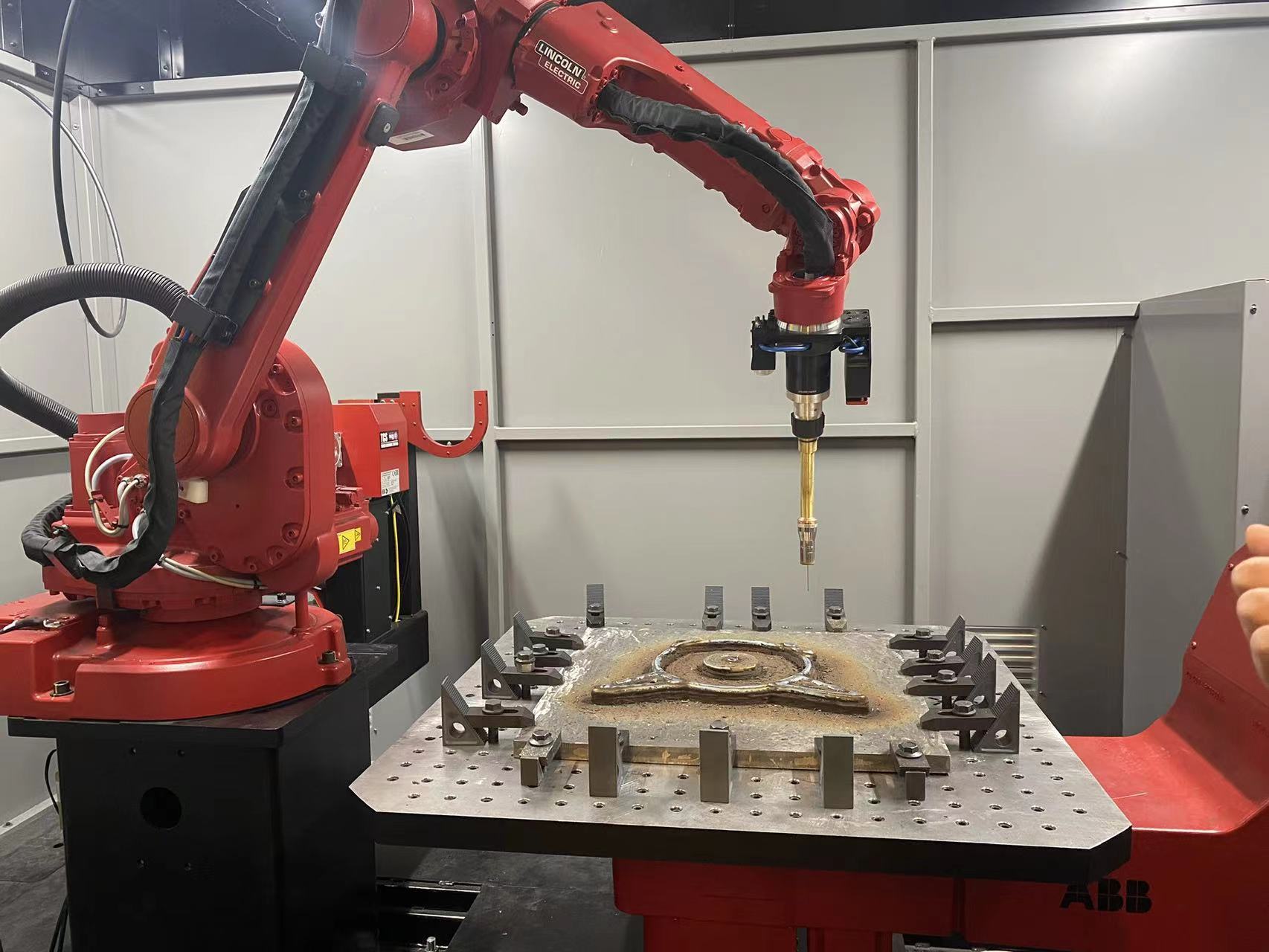
In-situ multimodal inspection technique for Robotic Wire Arc Additive Manufacturing (rWAAM)Biorobotics Lab & Manufacturing Futures Institute, Carnegie Mellon University May. 2021 – May. 2023 Background / Poster / Video / News / Paper / This project aim to add the sensing system to a Robotic Wire Arc Additive Manufacturing (rWAAM) robot and do the real time motion adjustment base on the sensor feedback.
|
|
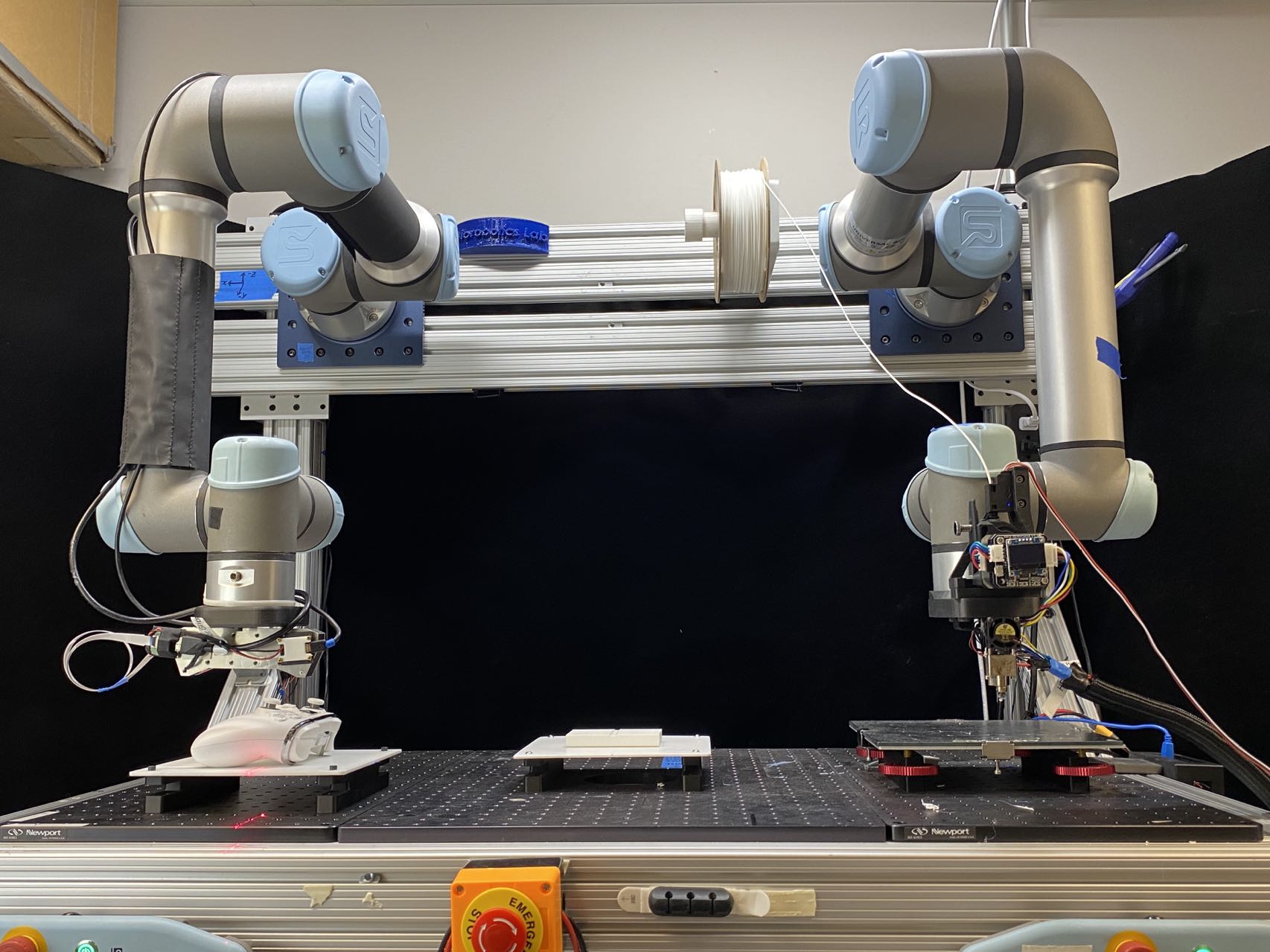
Boeing Addtive ManufacturingBiorobotics Lab, Carnegie Mellon University Aug. 2021 – May. 2023 Poster / Video / Paper / This project aim to design a system that combine advanced sense capability and plan to conventional manufacturing techniques.
|
|
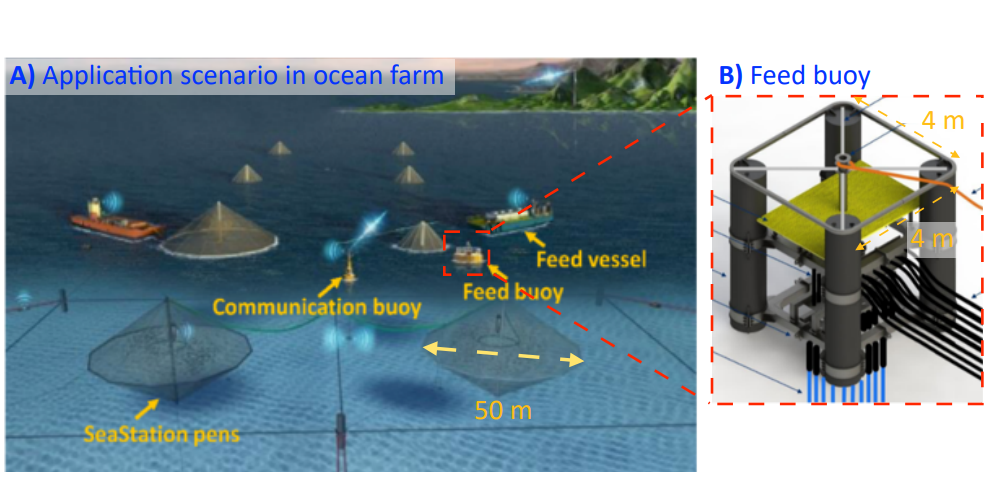
Self-Reactive Marine Energy Converter to Power Ocean AquacultureEnergy Harvesting and Mechatronics Research Laboratory Aug. 2020 – May. 2021 Background / Paper / This project aimed to design a system that generates electricity by using ocean wave energy for an intelligent fish farm.
|

|
In-Space Robotic Assembly Infrastructure DevelopmentField and Space Experimental Robotics (FASER) Laboratory Aug. 2020 – May. 2021 Background / Poster / Video / This project aimed to designed and build the Stewart Platform — the parallel robots capable of high-precision manipulation to assemble the structure automatically in uncertain environments (e.g. the lunar or Martian surface) by collaborative robotic agents.
|

|
Balto and Togo, Four-Legged Robot Locomotion ProjectHybrid Dynamic Systems and Robot Locomotion (HDSRL) Laboratory Jan. 2019 – Apr.2020 Background / This project aimed to design and build a quadruped dog shape robot to complete rescue missions in dangerous environments.
|
Project |
|
Pointcloud demo video generatorWei Chen, Fujun Ruan, Luyuan Wang, Xinzhi Yan, Zixin Zhang 2022.10 – 2022.12 Code / The project aims to help researchers output and display video of point cloud data based on user-defined paths. The input point cloud is processed in the following ways:
|
|
Auto Calibration ToolboxFujun Ruan & Yuchen Wu, Siyu Zhou 2022.10 – 2022.12 Poster / Code / The project aims to build a camera calibration toolbox based on robotic arm control. The goals of the project include:
|
Internships & Work Experience |

|
Robotics Competition FoundingMakeblock Aug. 2020 – May. 2021 Advisor & Competition R&D intern& Operational intern background /
|

|
Tech Education Startup CompanyNext Innovation Sep. 2019 – now Founder & CEO background /
|
|
Design and source code from Leonid Keselman's website |